TONY DALTON’S Police Launch from a MyHobbyStore plan
 article.jpg)
Radio control has been around for some time and was first suggested by Patrick Alexandra in 1888 and Nicola Tesla demonstrated his radio controlled system in 1898 for which he was granted a US patent. My interest in radio control dates back to the late 1950’s and being a Marconi Apprentice at that time, I built my own radio control set which was just a simple tuned radio frequency device that energised a relay when the transmitter was switched on. However, having built the device I did nothing with it as I was only interested in electronics and girl friends! However, I did sell the device to a close friend of my father who was very impressed when it was demonstrated to him.
I have come to realise that within the Luton & District MBC we have a wealth of knowledge regarding radio control of models and during a discussion with Tom Chapman, one of our senior members, he offered me some old radio parts to play with which included some escapements. After some serious thought I decided that it would be a good idea to build a small boat that operated on a simple escapement control principle, one for the rudder and another for the speed. How would modern day enthusiasts that are used to proportional control be able to cope controlling a model having only two push buttons to play with for steering and forward or reverse? Thus my new project was born.
Enjoy more Model Boats Magazine reading in the monthly magazine.
Click here to subscribe & save.
Escapement operating principles
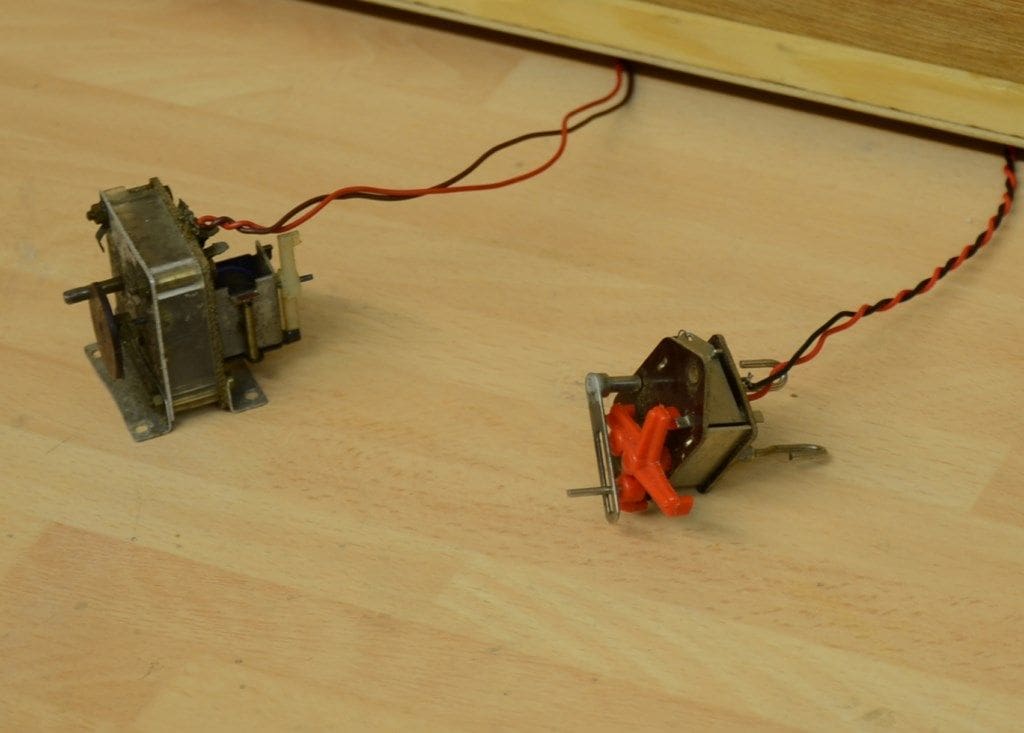
Perhaps I should explain the principle of operation of escapements for those readers not aware of such devices. The idea was that every time the transmitter key was pressed, the escapement control relay was energised and this moved a locking pawl thus allowing a rotating arm of the escapement to rotate 90 degrees. It would then remain in this new position providing that the transmitter was held in the transmit position. As soon as the transmitter ceased transmission the control relay and locking pawl would be released, allowing the rotating arm to move another 90 degrees. So if the rudder tiller arm was coupled to the escapement arm, when the transmitter was activated, the escapement arm would move the rudder to, say Port. Release the transmitter button and the rudder returns to neutral. Activate the transmitter again and the escapement arm would move the rudder to Starboard. Release the transmitter and the rudder returns again to neutral. This sequence could be repeated over and over again in order to control the model’s direction. One further thing I should mention is that the escapement’s ability to rotate was dependent on being either a clockwork motor or a wind-up rubber band device, so not exactly hi-tech. Two examples of escapements are shown in Photo 1 and the one on the left is clockwork driven.
Model subject and plans?
My first port of call was to select a suitable model to build. Searching the plans service of MyHobbyStore for a broad beamed vessel of about 0.75 metres long (30 inches in old money) I found Telectra, a harbour or police launch designed by N. E. Harris, Plan No. MM417. It was designed to be made of balsa wood and be powered by an AMCO 3.5cc i.c. engine, but I decided to build the model from plywood and power it using an electric motor. My version would be the police launch and include a flashing blue light and a siren, so making the project even more interesting. I should say right now that this is not a ‘blow by blow’ account of how to build the model, but more of an indication of how it was all done, so hopefully giving encouragement to readers to try something a bit different.
Design of control system
Having decided on the type of vessel, I then needed to design a control system that would fit within the hull. I would also need to build the system in order to check that the design would function correctly and be reliable.
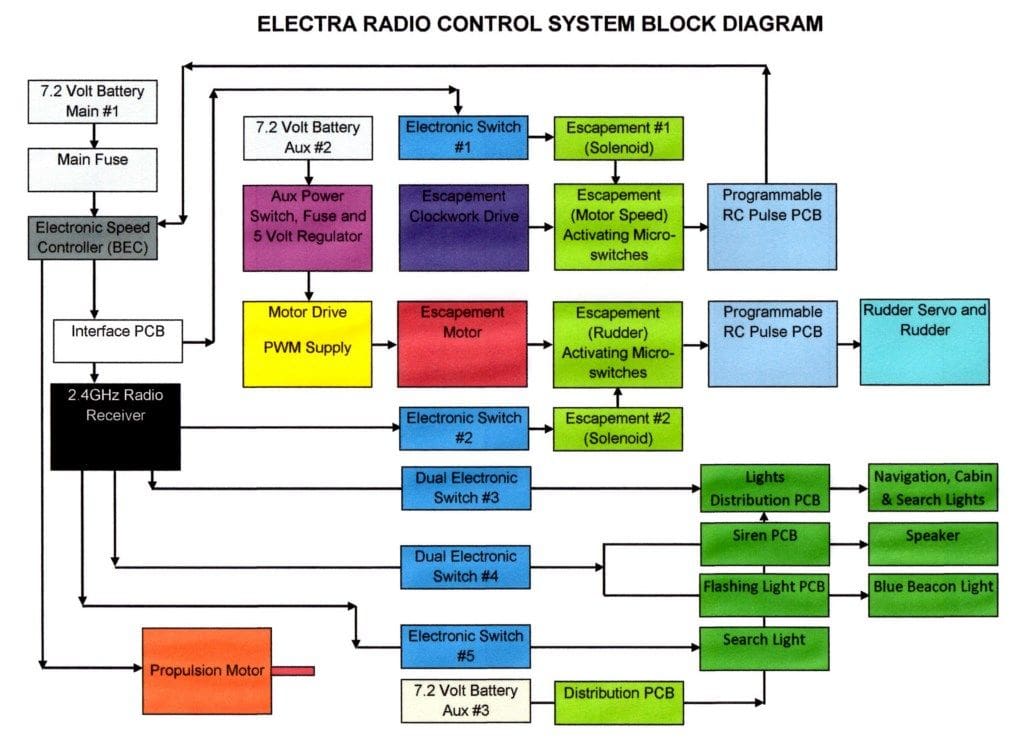
The requirements for the control system were that it should to be able to control the model by both modern proportional r/c and be able to change over and used as ‘old’ escapement control. To achieve this, the final control in each scenario would be a servo for the rudder and an electronic speed controller (esc) for the motor. When using the servo and esc in a modern set-up, they would be connected directly to the receiver as usual. However, when they were being used under escapement control, I needed to design some form of interface to go between the escapements and the rudder servo and esc. A block diagram of the proposed system is shown in Photo 2. The intention being obviously that the model could be operated in either form, without dismantling the r/c gear and providing a direct comparison of the two methods of operation.
Referring to the coloured block diagram, the system when under escapement control would work as follows:
Power to the esc (dark grey) is supplied from the main battery #1 via the main fuse (light grey). However, the signal lead is not connected to the esc but is diverted to the electronic switch #1 (dark blue). When this switch is activated by the transmitter it triggers the escapement solenoid #1 (light green), releasing the arm of the escapement which turns 90 degrees, switching one of two micro switches. The micro switches are attached to a programmable RC Pulse PCB (light blue) which causes its pulse width to alter. The output of this PCB is connected to the esc thus causing the esc to change from neutral to a pre-determined speed in a forwards direction. Release the switch and the escapement #1 and micro switch are released resulting in the programmable RC pulse and the esc being re-set to neutral. Activate the switch #1 (dark blue) again and the second micro switch is activated causing the programmable RC Pulse PCB #1 (light blue) to alter its pulse width again and change the esc from neutral to a speed in the reverse direction. Release the switch and the escapement #1 and the micro switch will be released resulting in the programmable RC pulse and the esc being re-set to neutral for a second time. This process may be repeated again and again to control the speed of the vessel.
The other escapement operates in a similar same way, but is activated from the transmitter via the electronic switch #2 (light blue). This controls the operation of escapement #2 which in turn operates the servo via its RC Pulse PCB, however the escapement is not clockwork driven, but uses a small electric motor (red) which is powered by the Aux #2 battery via a regulator and a pulse width modulation (PWM) speed controller.
Electronic switches #3 and #4 are operated by the transmitter to control the lighting, siren and blue flashing light.
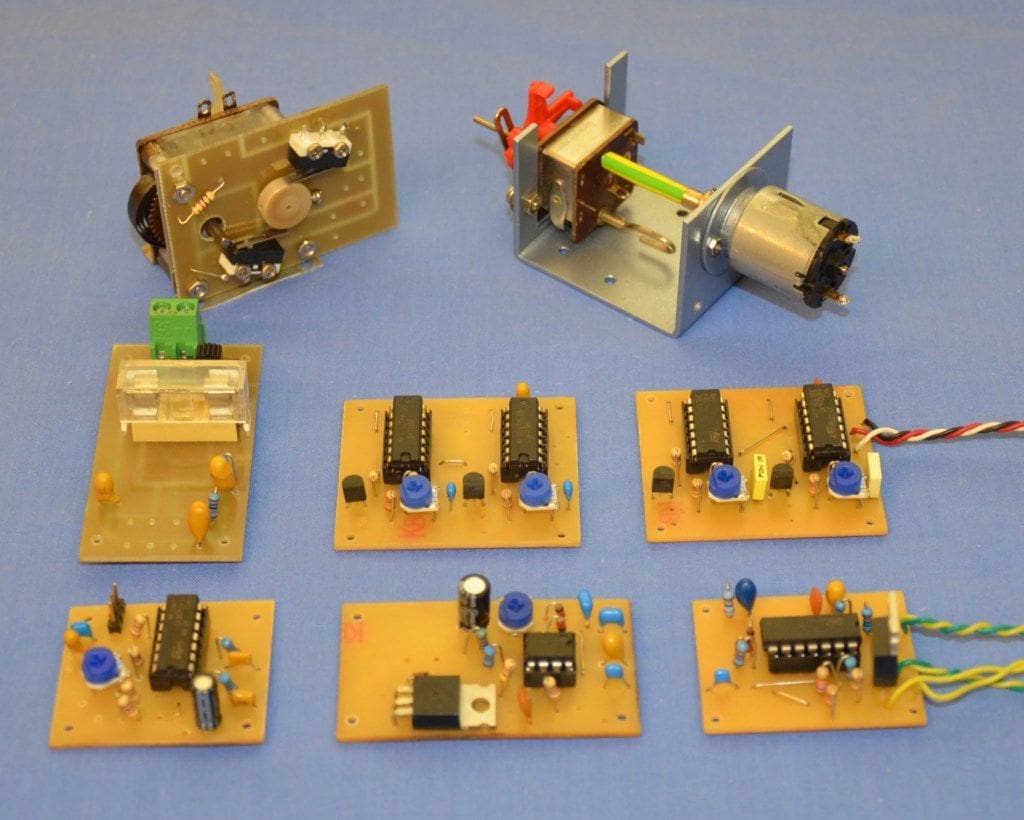
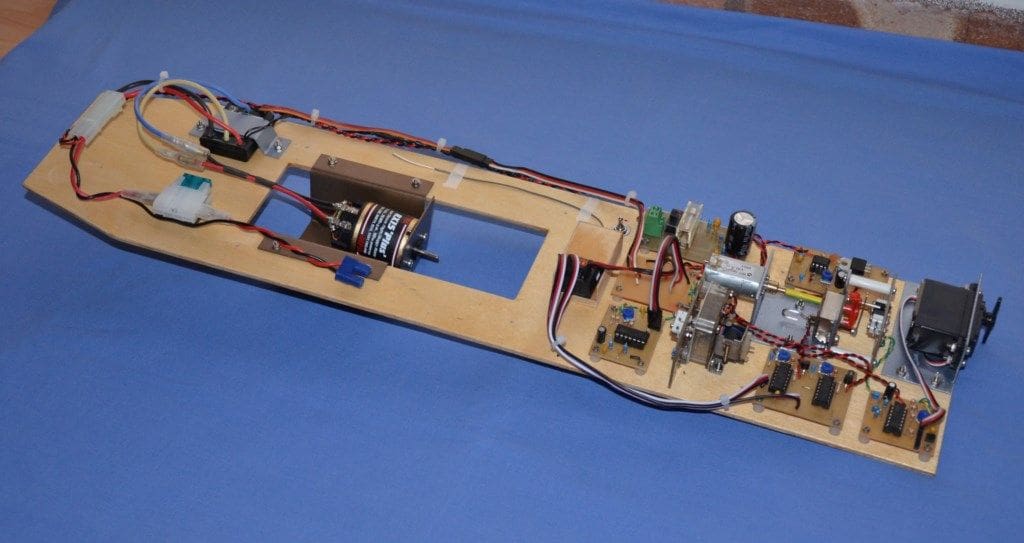
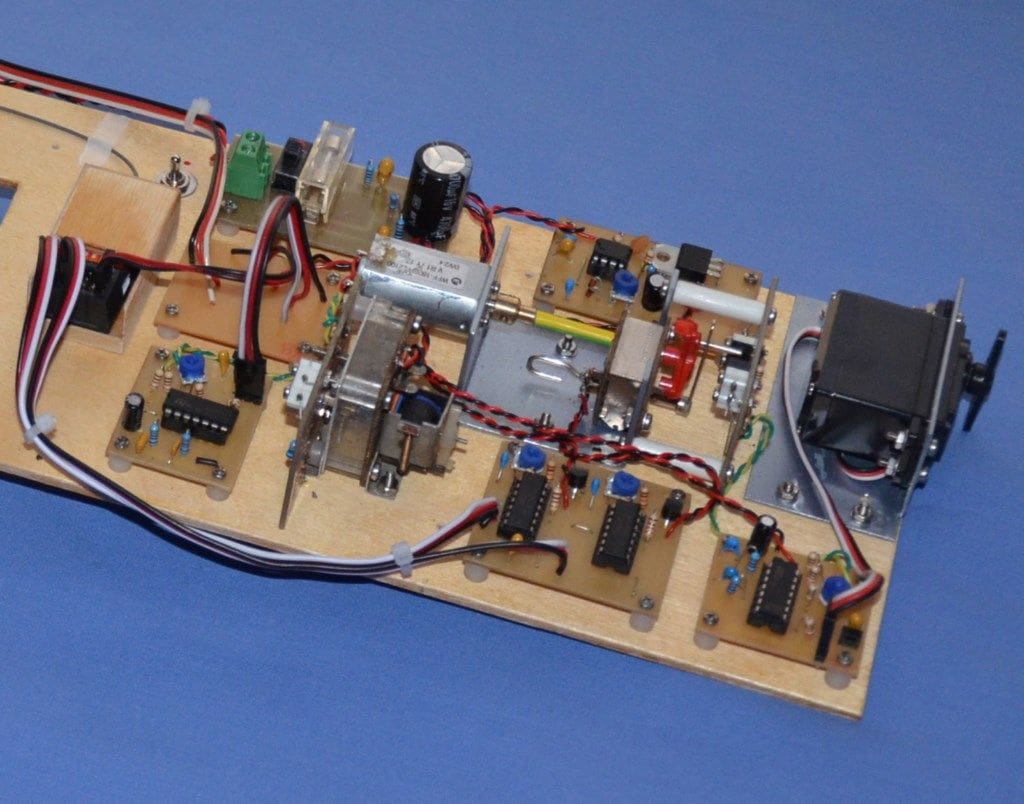
The next step was to build all the required parts as described and these were duly completed, wired together on the bench and apart from one or two minor glitches, they all worked correctly – hooray! Photo 3 shows all the individual assemblies (one escapement has not yet had its micro-switch board fitted) and Photo 4 is a view of the complete mounting board and r/c items (which includes the motor) and Photo 5 is a close-up of all the electronics. This complete board fits directly into the hull and only requires the connection of the propeller shaft coupling to the motor and the tiller arm to become fully operational. So, having now built and proved the control system it was time to construct the model.



Hull construction
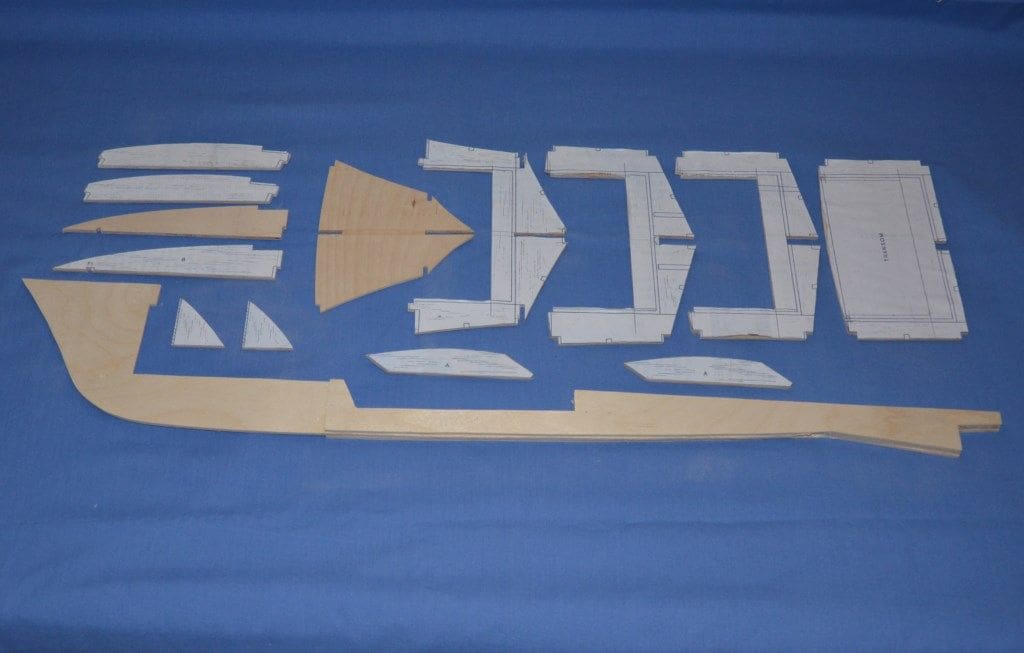
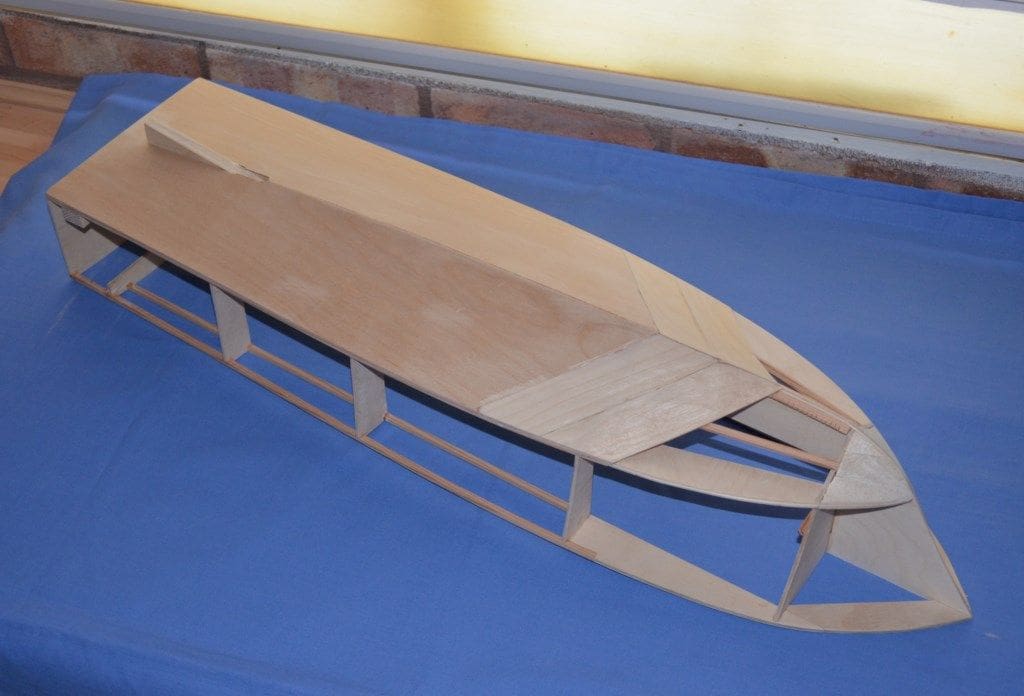
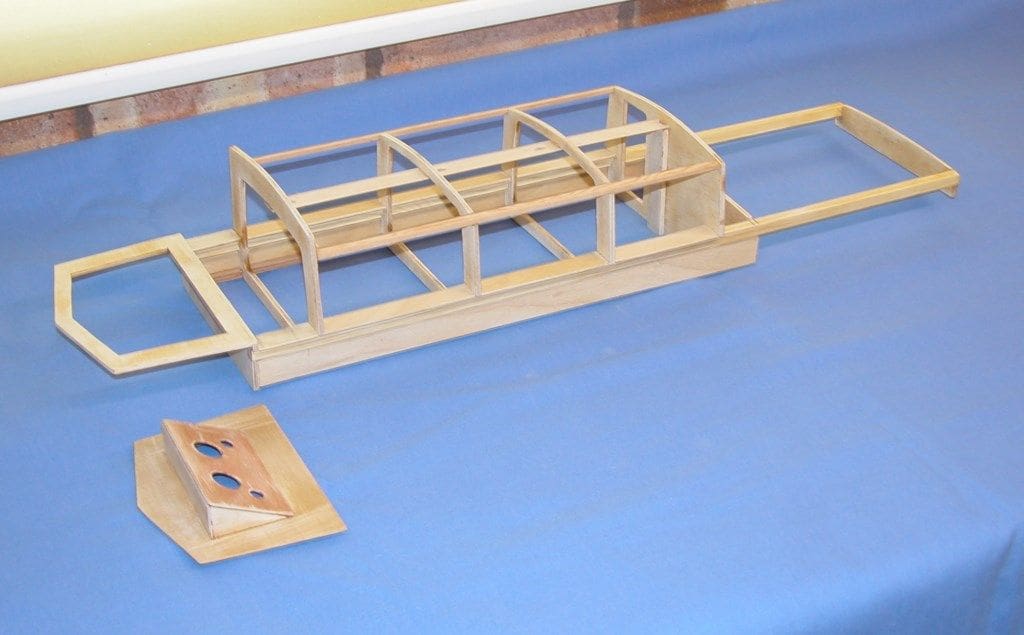
Photo 6 shows all the individual hull parts cut out awaiting assembly and Photo 7 is of the hull framework fully assembled. Okay, not quite as simple as that, but there is nothing difficult in building the hull framework, something that has often been covered in this magazine before. I was now able to measure the hull and decide on the dimensions for the single propshaft and twin rudders, which were all scratch built.
The next step was to clad the bottom of the hull, below its chine line, commencing at the stern with 1.0mm plywood. A single piece either side of the keel was fitted from the stern for about two thirds of the model’s length, the remainder being diagonally planked, including over the lower bow section which was filled with block balsa wood, Photo 8. With the lower hull planking complete, the propeller shaft and twin rudder tubes were installed and bonded into position, Photo 9 and Photo 10 is a view from underneath.
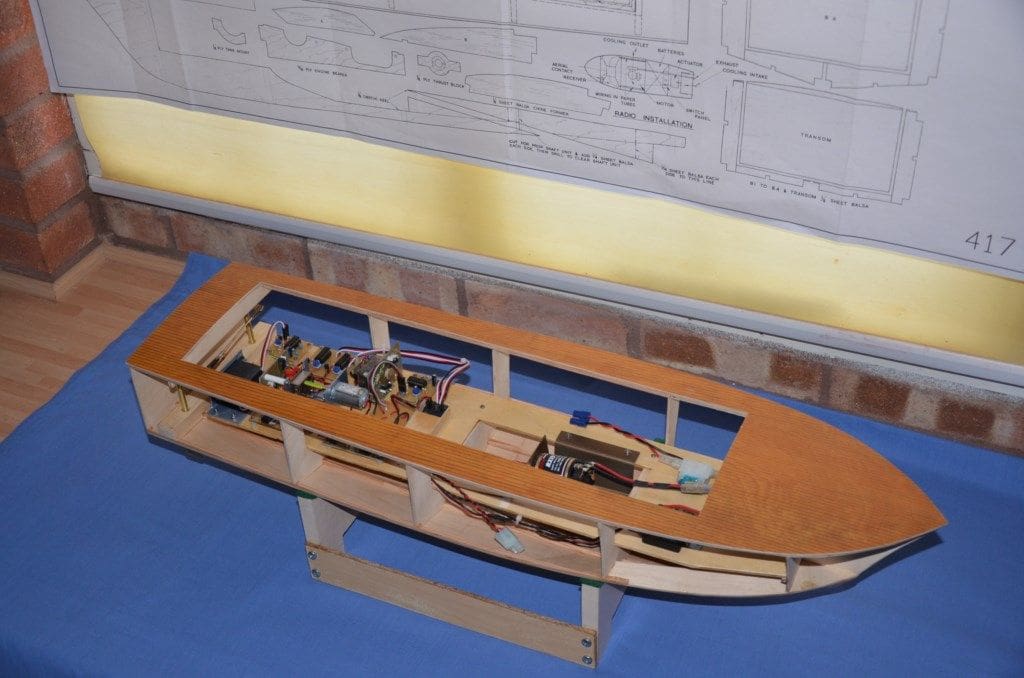
Next came the deck which was cut to its required profile and clamped to the hull framework. The access hatch was marked out by using the hull framework as a dimensional guide. At this stage, the deck planking was marked onto it using a 2H pencil and steel ruler, followed by a coat of oak coloured stain and two coats of clear varnish before bonding the deck to the hull framework as in Photo 11. Here, the control system platform was inserted into the hull, secured and correct connection of the propshaft and rudders checked. The whole system was again function tested prior to its removal to allow for planking of the hull sides. Photo 12 shows this and not how once again single pieces were used for the large relatively flat areas of hull sides. Everything was then covered in a lightweight fibreglass cloth with a coat of resin to protect the hull.
Once rubbed smooth and any defects made good, the hull had four applications of undercoat, again filling any minor blemishes between applications, then two colour top coats and the hull was almost complete. Deck fittings and the POLICE vinyl logos were then added, Photo 13, as easy as that!
Cabin
The next task was to design and construct this. Although the design was based on the Telectra drawing, the cabin was built such that the complete assembly could be removed from the hull to give improved access and enable removal of the r/c board and motor as a single item. It was also intended that the interior of the cabin would have an illuminated control console together with a ship’s wheel. The cabin would also have some depth to it by extending it below the deck and beyond the rear cabin door to form a small rear cockpit. To achieve this, the basic parts were copied from the original drawing, but then modified to meet the changed requirements. Templates were made, the parts cut out, and Photo 14 shows the hatch lower frame with all the other basic parts cut to shape prior to assembly.
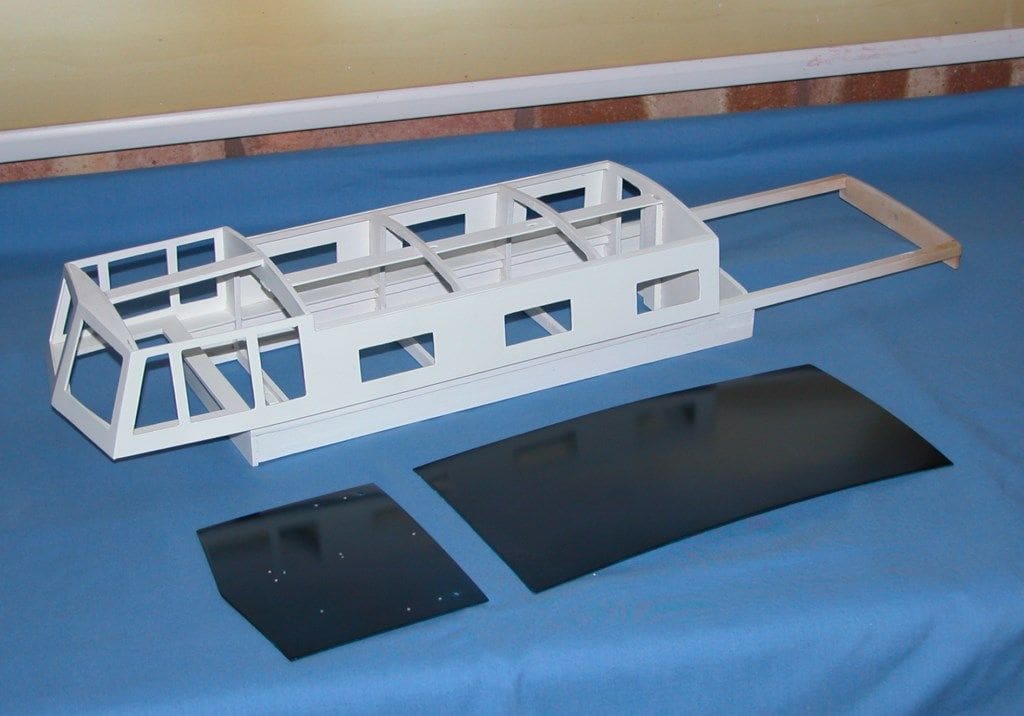
A control console was designed for the cabin and the required parts prepared, then the frame for the cabin and the console unit were all assembled as in Photo 15. Prior to adding the sides and front window panels, everything was painted with white undercoat, including the insides, to improve the brightness of the proposed internal lighting. The cabin sides were then glued to the internal framework together with the front window sections and then the entire unit was given a coat of white gloss paint.
The roof sections were undercoated in grey (on their outsides) and finished with dark blue gloss paint. Photo 16 shows the cabin and the roof sections complete and awaiting final assembly.
The glazing of the windows was carried out before fitting the front roof section which also allowed the assembly and wiring of the port and starboard navigation lights together with the searchlight. The wiring for these was routed along the central roof spar of the aft cabin and channelled down the back of the rear cabin wall. The rear cabin roof was then fixed into position and the rear hatch cover fitted, which had some slots cut into its rear section for a small speaker for the siren. This completed the basic cabin assembly, Photo 17.






Final wiring
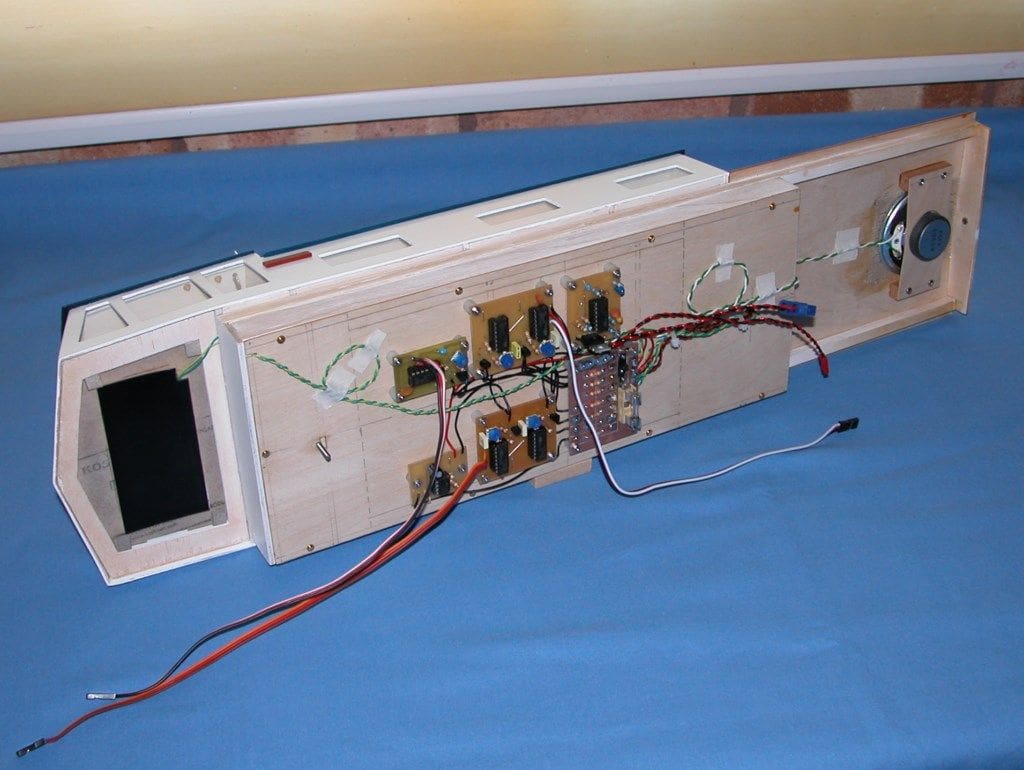
Now was time to terminate all the cabin wiring for the lighting and siren sound system. All the electronic switches and siren PCBs were mounted on the underside of the cabin floor and the associated wires terminated to the PCB’s, Photo 18. The complete system was then tested to verify that it worked, not a bad idea! I am glad to say that everything did what it should in accordance with the design and no modifications were required.
Finishing off
Some grab rails were made from 2mm thick styrene sheet and fitted each side of the rear cabin roof. Two nameplates were added together with transfers for the craft’s name, thus completing the build of the vessel as in Photo 19.
In order to make controlling the vessel be more like the single channel escapement systems the 2.4GHz transmitter controls were modified by adding two push button switches to the front panel for controlling the motor power and the rudder respectively, Photo 20.
Sea trials
Having now completed the model, it was time for a trip to the local lake for the sea trials. Initially it was tested using modern proportional control and when satisfied that the model was sound and functioning as it should, I changed the system over to escapement control in order to put that system to the test and the verdict? Well, very tricky for those of us not used to handling a vessel with push button escapement control, but maybe I will improve with more practice. The problem comes in remembering the sequence, particularly if the model is coming towards you and you have just done a port turn and want to now do another port turn, or just simply stop!
Conclusion
I suppose the point is that nowadays perhaps we just don’t appreciate how easy it is for us with modern digital r/c with all its variable electronic settings. This project has been interesting as it enables a direct comparison of ‘then and now’ operating principles, so it has been thoroughly worthwhile and has provided another dimension to my model boating.







Supplier data
Telectra Plans MM417: MyHobbyStore
20Amp Marine Esc: Mtroniks
Mabuchi RX15 Plus Electric Motor: MFA
Searchlight and ventilators: Reade Models
Navigation light housings)
Brass propeller ) Cornwall Model Boats
Ship’s horn )